
Всего два года назад крошечный робот-скат-манта стал самым быстрым в мире плавающим роботом с мягким телом. Что ж, один из его потомков теперь побил этот рекорд – и он использует меньше энергии, чем его предшественник, к тому же.
Оригинальный робот длиной 22,8 мм был разработан доц. Профессор Цзе Инь и его коллеги из Университета штата Северная Каролина.
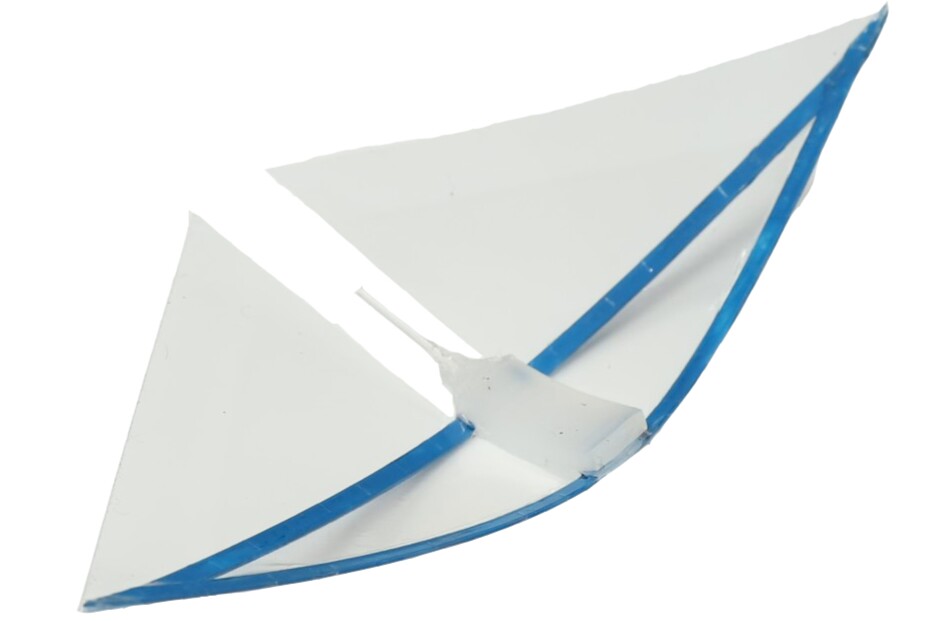
Он имел два гибких крыла из полиэстера, напоминающие скатов манты, которые на самом деле были левым и правым концами единой изогнутой бистабильной конструкции. Бистабильность означает способность натяжной конструкции оставаться в любом из двух положений, не требуя для этого энергии. Заколка для волос является хорошим примером бистабильной структуры.
Государственный университет Северной Каролины
Середина бистабильной конструкции крыла робота была зажата между верхним и нижним пневмоприводами из мягкого силикона.
Когда воздух подавался в верхний привод, он изгибался вверх и тянулся вверх в середину конструкции крыла, заставляя его «защелкиваться» в положении, при котором оба крыла опускались вниз. Когда верхний привод сдут и вниз один из них надулся, конструкция сломалась в противоположном направлении, подняв крылья вверх. Механизм продемонстрирован в следующем видео.
Нежный плавающий робот, похожий на бабочку, быстрый и эффективный.
Активируя таким образом оба привода (через внешний воздушный насос), можно было взмахивать крыльями достаточно быстро, чтобы средняя скорость плавания составляла 3,74 длины тела в секунду. По словам ученых, это произошло примерно в четыре раза быстрее, чем ранее было возможно для мягкотелых плавающих роботов.
Длина 68 мм. новый robo-manta, Инь и его команда удалили бистабильную конструкцию, а также нижний привод. Гибкая конструкция крыла теперь моностабильна, то есть она всегда возвращается в одно положение — согнутое посередине с поднятыми крыльями — когда не прикладывается энергия.
Хайтао Цин, Университет штата Северная Каролина
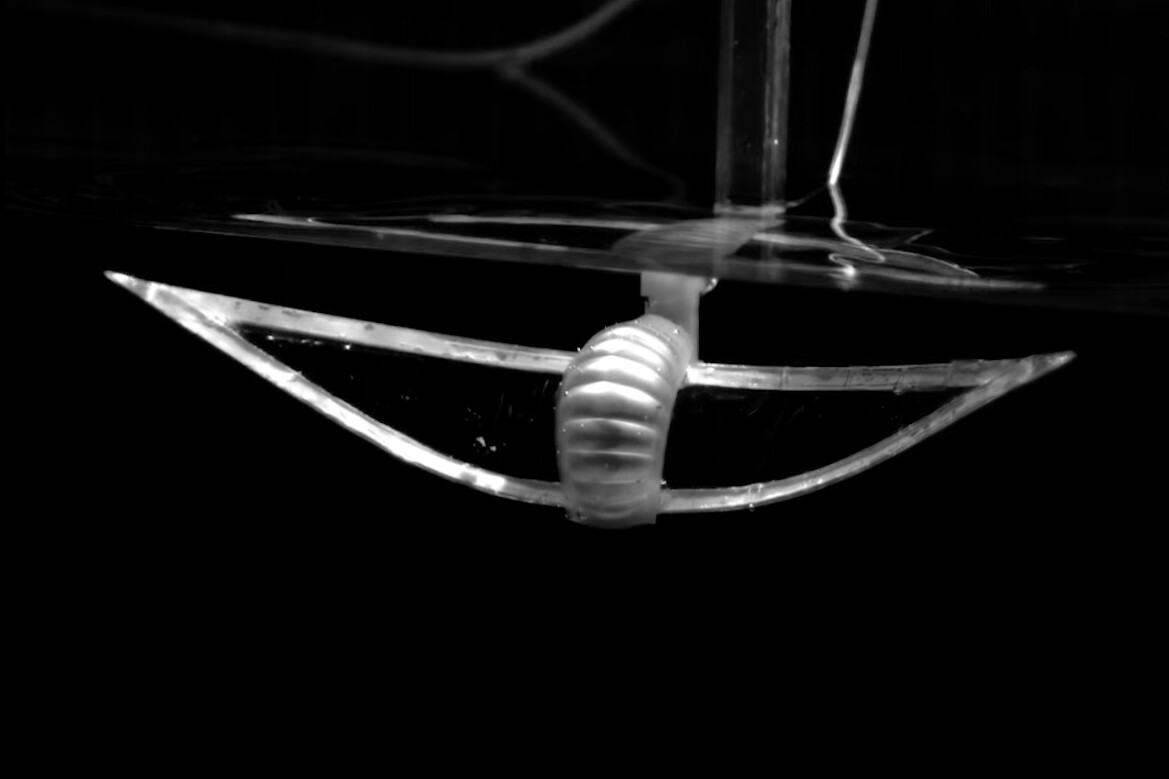
После надувания уникальный верхний пневматический привод сгибается вниз и тянет вниз середину конструкции крыла, заставляя крылья хлопнуть вниз. Однако как только исполнительный механизм может сдуться, упругая восстанавливающая сила конструкции заставляет его вернуться в исходное положение, тем самым подтягивая крылья вверх.
Таким образом, в то время как оригинальному роботу приходилось тратить время и силы на поочередное надувание/сдувание двух приводов за цикл взмахов крыльев вверх и вниз, новому роботу достаточно активировать только один. Это улучшение дает роботу среднюю скорость плавания 6,8 длины тела в секунду, потребляя при этом в 1,6 раза меньше энергии, чем оригинал.
Хайтао Цин, Университет штата Северная Каролина
Кроме того, новая конструкция позволяет роботу двигаться вертикально в толще воды, просто изменяя скорость плавания.
«Когда плавники робота находятся в состоянии покоя, воздушная камера пуста, что снижает плавучесть робота. А когда робот медленно взмахивает плавниками, плавники чаще находятся в состоянии покоя», — говорит Хайтао Цин, докторант и первый автор изучение. . «Другими словами, чем быстрее робот взмахивает плавниками, тем полнее внутренняя труба, что делает ее более плавучей».
В настоящее время ученые работают над методом бокового управления роботом с целью его будущих применений, таких как исследование океана и наблюдение за водной фауной. Вы можете увидеть действие там на видео ниже.
Статья об исследовании была недавно опубликована в журнале. Научные достижения.
Гибкие, быстрые и маневренные плавающие роботы, вдохновленные скатами манты.